Projeto de Sensor de Proximidade para Braço Robótico
Introdução
Este documento descreve o projeto de um sensor de proximidade integrado a um braço robótico. O sensor será montado na ponta do braço e servirá como uma forma de verificação para determinar se um item foi adequadamente agarrado pelo braço robótico. O sensor de proximidade ativará um LED e um buzzer dependendo da distância do objeto em relação ao sensor. Além disso, será exibida uma mensagem no monitor serial indicando se um objeto está sendo detectado ou não.
Itens Utilizados
- 1 Raspberry PICO
- 1 Resistor de 220 Ohms
- 1 Resistor de 10K Ohms
- 1 LED vermelho
- 1 Buzzer
- Fios macho-macho e macho-fêmea
Diagrama Esquemático
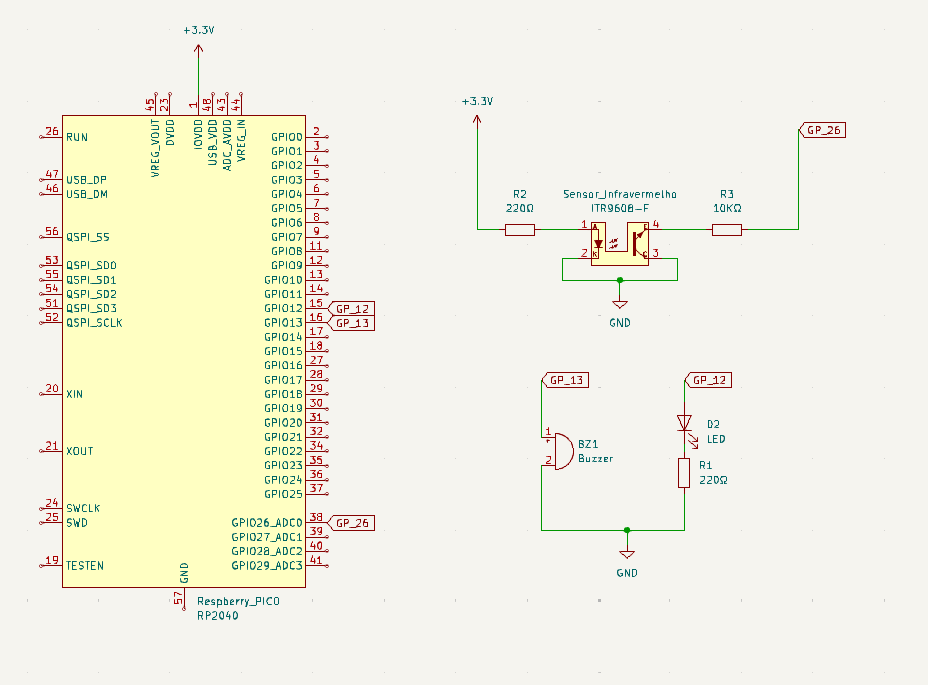
Fonte: Elaboração Grupo 4U
Procedimento de Montagem
- Conecte o LED vermelho ao Raspberry PICO, utilizando o resistor de 220 Ohms para limitar a corrente - porta GPIO 12.
- Conecte o buzzer ao Raspberry PICO sem resistor - porta GPIO 13.
- Conecte o sensor de proximidade ao Raspberry PICO - porta GPIO26 para poder emitir o sinal.
- Conecte o Raspberry PICO ao monitor serial para exibir as mensagens de detecção.
Funcionamento
O sensor de proximidade detectará a presença de objetos próximos. Dependendo da distância, o LED vermelho será ativado e o buzzer emitirá um som. Além disso, uma mensagem será exibida no monitor serial indicando se um objeto está sendo detectado ou não.
Código Fonte
# Importação das bibliotecas necessárias
from machine import Pin, ADC # Importa as classes Pin e ADC da biblioteca machine para controle dos pinos e conversão analógico-digital
import utime # Importa a biblioteca utime para manipulação de tempo
# Pino GPIO conectado ao sensor óptico reflexivo
pino_sensor = ADC(26) # Cria um objeto ADC para ler a entrada analógica do pino GPIO 26, que está conectado ao sensor
# Pino GPIO conectado ao LED
pino_led = Pin(12, Pin.OUT) # Cria um objeto Pin para controlar o pino GPIO 12 como saída, conectado ao LED
pino_buz = Pin(13, Pin.OUT)
# Loop principal
while True:
# Ler o estado do pino do sensor
estado_sensor = pino_sensor.read_u16() # Lê o valor analógico do sensor e armazena em estado_sensor
print(estado_sensor) # Imprime o valor do sensor
# Controlar o LED com base no estado do sensor
if estado_sensor <= 25000: # Se o valor do sensor for menor ou igual a 62000
print("Objeto: Detectado") # Imprime uma mensagem indicando que um objeto foi detectado
pino_led.on() # Ligar o LED, acionando o pino conectado ao LED
pino_buz.on() # Ligar o Buzzer, acionando o pino conectado ao Buzzer
else: # Caso contrário
print("Objeto: Ausente") # Imprime uma mensagem indicando que nenhum objeto foi detectado
pino_led.off() # Desligar o LED, desativando o pino conectado ao LED
pino_buz.off() # Desligar o Buzzer, desativando o pino conectado ao Buzzer
# Aguardar um curto período de tempo antes de verificar novamente
utime.sleep(1) # Espera por 1 segundo antes de repetir o loop para evitar leituras muito frequentes
Conclusão
Este projeto demonstra como utilizar um sensor de proximidade integrado a um braço robótico para verificar se um objeto foi adequadamente agarrado. Com a combinação do LED, buzzer e monitor serial, é possível obter feedback visual, auditivo e textual sobre a detecção de objetos. Este sistema pode ser útil em diversas aplicações onde a verificação de pegada é importante.